-
RESOLUTION OF VECTORS
RESOLUTION OF VECTORS
Let a and b be any two non-zero vectors in a plane with different directions and let A be another vector in the same plane(Fig. 4.8). A can be expressed as a sum of two vectors — one obtained by multiplying a by a real number and the other obtained by multiplying b by another real number. To see this, let O and P be the tail and head of the vector A. Then, through O, draw a straight line parallel to a, and through P, a straight line parallel to b. Let them intersect at Q. Then, we have
A = OP = OQ + QP(4.6)
But since OQ is parallel to a, and QP is parallel to b, we can write :
OQ = \(\lambda\) a, and QP = µ b(4.7) where \(\lambda\) and µ are real numbers.
Therefore,A = \(\lambda\)a + µ b(4.8)
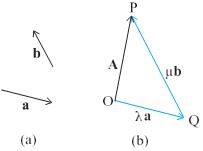
fig 4.8.(a)Two non-colinear vectors a and b.(b) Resolving a vector Ain terms of vectors a and b
We say that A has been resolved into two component vectors \(\lambda\) a and µb along a and b respectively.Using this method one can resolve a given vector into two component vectors along a set of two vectors – all the three lie in the same plane. It is convenient to resolve a general vector along the axes of a rectangular coordinate system using vectors of unit magnitude. These are called unit vectors that we discuss now. A unit vector is a vector of unit magnitude and points in a particular direction.It has no dimension and unit. It is used to specify a direction only. Unit vectors along the x-, y- and z-axes of a rectangular coordinate system are denoted by \(\hat i,\hat j\) and \(\hat k\),respectively, as shown in fig.4.9(a).
Since these are unit vectors, we have
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaWaaqWaaeaace % WGPbGbaKaaaiaawEa7caGLiWoacqGH9aqpdaabdaqaaiqadQgagaqc % aaGaay5bSlaawIa7aiabg2da9maaemaabaGabm4AayaajaaacaGLhW % UaayjcSdGaeyypa0JaaGymaaaa!4626! \left| {\hat i} \right| = \left| {\hat j} \right| = \left| {\hat k} \right| = 1\)
These unit vectors are perpendicular to each other.In this text, they are printed in bold face with a cap (^) to distinguish them from other vectors. Since we are dealing with motion in two dimensions in this chapter, we require use of only two unit vectors. If we multiply a unit
vector,say n by a scalar, the result is a vector \(\lambda\)=\(\lambda\)\(\hat n\) In general, a vector A can be written as
A = |A| n
where n is a unit vector along A.
We can now resolve a vector A in terms of component vectors that lie along unit vectors \(\hat i\) and \(\hat j\) .Consider a vector A that lies in x-y plane as shown in Fig. 4.9(b). We draw lines from the head of A perpendicular to the coordinate axes as in Fig. 4.9(b), and get vectors A1 and A2 such that A1+ A2 = A. Since A1 is parallel to \(\hat i\).
and A2 is parallel to \(\hat j\) , we have
A1= Ax \(\hat i\) , A2 = Ay\(\hat j\)
where Ax and Ay are real numbers
Thus, A = Ax \(\hat i\) + Ay \(\hat j\)This is represented in Fig. 4.9(c). The quantities Ax and Ay are called x-, and y- components of the vector A. Note that Ax is itself not a vector, but Ax\(\hat i\) is a vector, and so is Ay\(\hat j\).Using simple trigonometry, we can express Ax and Ay in terms of the magnitude of A and the angle \(\theta\) it makes
with the x-axis :
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGceaqabeaacaWGbb % WaaSbaaSqaaiaadIhaaeqaaOGaeyypa0JaamyqaiGacogacaGGVbGa % ai4CaiabeI7aXbqaaiaadgeadaWgaaWcbaGaamyEaaqabaGccqGH9a % qpcaWGbbGaci4CaiaacMgacaGGUbGaeqiUdehaaaa!469F! \begin{array}{l} {A_x} = A\cos \theta \\ {A_y} = A\sin \theta \end{array}\)
As is clear from Eq. (4.13), a component of a vector can be positive, negative or zero depending on the value of \(\theta\).
Now, we have two ways to specify a vector A in a plane. It can be specified by :
1.Its magnitude A and the direction \(\theta\) it makes with the x-axis; or
2.Its components Ax and Ay If A and \(\theta\) are given, Ax and Ay can be obtained using Eq. (4.13). If Ax and Ay are given, A and \(\theta\) can be obtained as follows:
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGceaqabeaacaWGbb % Waa0baaSqaaiaadIhaaeaacaaIYaaaaOGaey4kaSIaamyqamaaDaaa % leaacaWG5baabaGaaGOmaaaakiabg2da9iaadgeadaahaaWcbeqaai % aaikdaaaGcciGGJbGaai4BaiaacohadaahaaWcbeqaaiaaikdaaaGc % cqaH4oqCcqGHRaWkcaWGbbWaaWbaaSqabeaacaaIYaaaaOGaci4Cai % aacMgacaGGUbWaaWbaaSqabeaacaaIYaaaaOGaeqiUdehabaGaeyyp % a0JaamyqamaaCaaaleqabaGaaGOmaaaaaOqaaiaadgeacqGH9aqpda % GcaaqaaiaadgeadaqhaaWcbaGaamiEaaqaaiaaikdaaaGccqGHRaWk % caWGbbWaa0baaSqaaiaadMhaaeaacaaIYaaaaaqabaaakeaacaWGbb % GaamOBaiaadsgacaaMc8UaaGPaVlGacshacaGGHbGaaiOBaiabeI7a % Xjabg2da9maalaaabaGaamyqamaaBaaaleaacaWG5baabeaaaOqaai % aadgeadaWgaaWcbaGaamiEaaqabaaaaOGaaiilaiabeI7aXjabg2da % 9iGacshacaGGHbGaaiOBamaaCaaaleqabaGaeyOeI0IaaGymaaaakm % aalaaabaGaamyqamaaBaaaleaacaWG5baabeaaaOqaaiaadgeadaWg % aaWcbaGaamiEaaqabaaaaaaaaa!72EC! \begin{array}{l} A_x^2 + A_y^2 = {A^2}{\cos ^2}\theta + {A^2}{\sin ^2}\theta \\ = {A^2}\\ A = \sqrt {A_x^2 + A_y^2} \\ And\,\,\tan \theta = \frac{{{A_y}}}{{{A_x}}},\theta = {\tan ^{ - 1}}\frac{{{A_y}}}{{{A_x}}} \end{array}\)
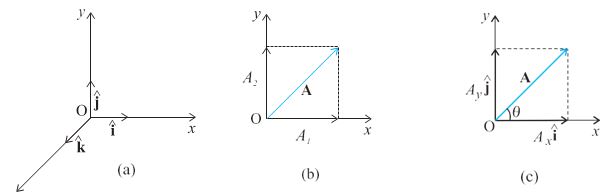
fig.4.9. (a)Unit vectors \(\hat i,\hat j\) and \(\hat k\), lie along the x-, y-, and z-axes.
(b) A vector A is resolved into its components Ax and Ay along x-, and y- axes.
(c) A1 and A2 expressed in terms of \(\hat i\) and \(\hat j\) .
So far we have considered a vector lying in an x-y plane. The same procedure can be used to resolve a general vector A into three components along x-, y-, and z-axes in three dimensions. If \(\alpha,\beta\) and \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeq4SdCgaaa!379D! \gamma \) are the angles* between A and the x-, y-, and z-axes, respectively [Fig. 4.9(d)], we have
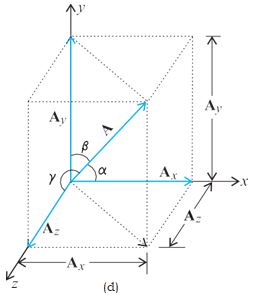
fig.4.9.(d)A vector A resolved into components along x-, y-, and z-axes.
A x = A cos \(\alpha\), Ay= A cos \(\beta\), Az=A cos\(\gamma\)
In general, we have
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyqaiabg2 % da9iaadgeadaWgaaWcbaGaamiEaaqabaGcceWGPbGbaKaacqGHRaWk % caWGbbWaaSbaaSqaaiaadMhaaeqaaOGabmOAayaajaGaey4kaSIaam % yqamaaBaaaleaacaWG6baabeaakiqadUgagaqcaaaa!4271! A = {A_x}\hat i + {A_y}\hat j + {A_z}\hat k\)
The magnitude of vector A is
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyqaiabg2 % da9maakaaabaGaamyqamaaDaaaleaacaWG4baabaGaaGOmaaaakiab % gUcaRiaadgeadaqhaaWcbaGaamyEaaqaaiaaikdaaaGccqGHRaWkca % WGbbWaa0baaSqaaiaadQhaaeaacaaIYaaaaaqabaaaaa!41B1! A = \sqrt {A_x^2 + A_y^2 + A_z^2} \)
A position vector r can be expressed as
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOCaiabg2 % da9iaadIhaceWGPbGbaKaacqGHRaWkcaWG5bGabmOAayaajaGaey4k % aSIaamOEaiqadUgagaqcaaaa!3FAE! r = x\hat i + y\hat j + z\hat k\)
where x, y, and z are the components of r along x-, y-, z-axes, respectively