-
Conservation of Momentum
Conservation of Momentum
The second and third laws of motion lead to an important consequence: the law of conservation of momentum.Take a familiar example. A bullet is fired from a gun. If the force on the bullet by the gun is F, the force on the gun by the bullet is –F, according to the third law. The two forces act for a common interval of time \(\Delta\)t. According to the second law, F \(\Delta\)t is the change in momentum of the bullet and –F \(\Delta\)t is the change in momentum of the gun. Since initially, both are at rest, the change in momentum equals the final momentum for each. Thus if pb is the momentum of the bullet after firing and pg is the recoil momentum of the gun, pg = –p b i.e. p b + p g = 0. That is, the total momentum of the (bullet + gun) system is conserved.
Thus in an isolated system (i.e. a system with no external force), mutual forces between pairs of particles in the system can cause momentum change in individual particles, but since the mutual forces for each pair are equal and opposite, the momentum changes cancel in pairs and the total momentum remains unchanged. This fact is known as the law of conservation of momentum:
The total momentum of an isolated system of interacting particles is conserved.
An important example of the application of the law of conservation of momentum is the collision of two bodies. Consider two bodies A and B, with
initial momenta pA and pB. The bodies collide, get apart, with final momenta \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGabmiCayaafa % aaaa!36F7! p'\)A and \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGabmiCayaafa % aaaa!36F7! p'\) B respectively. By the Second Law.
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGceaqabeaacaWGgb % WaaSbaaSqaaiaadgeacaWGcbaabeaakiabgs5aejaadshacqGH9aqp % ceWGWbGbauaadaWgaaWcbaGaamyqaaqabaGccqGHsislcaWGWbWaaS % baaSqaaiaadgeaaeqaaOGaamyyaiaad6gacaWGKbaabaGaamOramaa % BaaaleaacaWGcbGaamyqaaqabaGccqGHuoarcaWG0bGaeyypa0Jabm % iCayaafaWaaSbaaSqaaiaadkeaaeqaaOGaeyOeI0IaamiCamaaBaaa % leaacaWGcbaabeaaaaaa!4E55! \begin{array}{l} {F_{AB}}\Delta t = {{p'}_A} - {p_A}and\\ {F_{BA}}\Delta t = {{p'}_B} - {p_B} \end{array}\)
(where we have taken a common interval of time for both forces i.e. the time for which the two bodies are in contact.)
Since FAB=-FBA by the third law,
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGceaqabeaacqGH9a % qpceWGWbGbauaadaWgaaWcbaGaamyqaaqabaGccqGHsislcaWGWbWa % aSbaaSqaaiaadgeaaeqaaOGaeyypa0JaeyOeI0YaaeWaaeaaceWGWb % GbauaadaWgaaWcbaGaamOqaaqabaGccqGHsislcaWGWbWaaSbaaSqa % aiaadkeaaeqaaaGccaGLOaGaayzkaaaabaGaamyAaiaac6cacaWGLb % GaaiOlaiabg2da9iqadchagaqbamaaBaaaleaacaWGcbaabeaakiab % gkHiTiaadchadaWgaaWcbaGaamOqaaqabaGccqGH9aqpcaWGWbWaaS % baaSqaaiaadgeaaeqaaOGaey4kaSIaamiCamaaBaaaleaacaWGcbaa % beaaaaaa!5317! \begin{array}{l} = {{p'}_A} - {p_A} = - \left( {{{p'}_B} - {p_B}} \right)\\ i.e. = {{p'}_B} - {p_B} = {p_A} + {p_B} \end{array}\)
which shows that the total final momentum of the isolated system equals its initial momentum.
Notice that this is true whether the collision is elastic or inelastic. In elastic collisions, there is a second condition that the total initial kinetic energy of the system equals the total final kinetic energy (See Chapter 6).
-
Equilibrium of a Particle
Equilibrium of a Particle
Equilibrium of a particle in mechanics refers to the situation when the net external force on the particle is zero*.According to the first law, thismeans that, the particle is either at rest or in uniform motion.
If two forces F 1 and F 2, act on a particle, equilibrium requires
F1 =- F2
i.e. the two forces on the particle must be equal and opposite.Equilibrium under three concurrent forces F1, F 2 and F3 requires that
the vector sum of the three forces is zero.
F1 +F2+ F3= 0
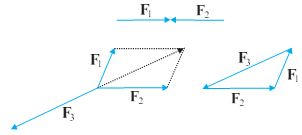
fig.5.7. Equilibrium under concurrent forces.
In other words, the resultant of any two forces say F1 and F2,obtained by the parallelogram law of forces must be equal and opposite to thethird force, F3. As seen in Fig. 5.7, the three forces in equilibrium can be represented by the sides of a triangle with the vector arrows taken in the same sense. The result can be generalised to any number of forces.A particle is in equilibrium under the action of forces F1, F ,... F if they can be represented by the sides of a closed n-sided polygon with arrows directed in the same sense.
Equation (5.11) implies that
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGceaqabeaacaWGgb % WaaSbaaSqaaiaaigdacaWG4baabeaakiabgUcaRiaadAeadaWgaaWc % baGaaGOmaiaadIhaaeqaaOGaey4kaSIaamOramaaBaaaleaacaaIZa % GaamiEaaqabaGccqGH9aqpcaaIWaaabaGaamOramaaBaaaleaacaaI % XaGaamyEaaqabaGccqGHRaWkcaWGgbWaaSbaaSqaaiaaikdacaWG5b % aabeaakiabgUcaRiaadAeadaWgaaWcbaGaaG4maiaadMhaaeqaaOGa % eyypa0JaaGimaaqaaiaadAeadaWgaaWcbaGaaGymaiaadQhaaeqaaO % Gaey4kaSIaamOramaaBaaaleaacaaIYaGaamOEaaqabaGccqGHRaWk % caWGgbWaaSbaaSqaaiaaiodacaWG6baabeaakiabg2da9iaaicdaaa % aa!591D! \begin{array}{l} {F_{1x}} + {F_{2x}} + {F_{3x}} = 0\\ {F_{1y}} + {F_{2y}} + {F_{3y}} = 0\\ {F_{1z}} + {F_{2z}} + {F_{3z}} = 0 \end{array}\)
where F1x, F1y and F1z are the components of F1 along x,y and z directions respectively.
EXAMPLE 6
See Fig. 5.8. A mass of 6 kg is suspended by a rope of length 2 m from the ceiling. A force of 50 N in the horizontal direction is applied at the mid- point P of the rope, as shown. What is the angle the rope makes with the vertical in equilibrium ? (Take g = 10 m s-2). Neglect the mass of the rope.
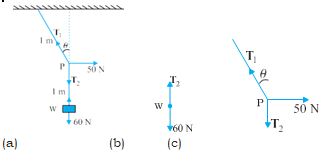
fig.5.8.
ANSWER
Figures 5.8(b) and 5.8(c) are known as free-body diagrams. Figure 5.8(b) is the free-body diagram of W and Fig. 5.8(c) is the free-body diagram of point P.
Consider the equilibrium of the weight W. Clearly,T2 = 6 × 10 = 60 N.
Consider the equilibrium of the point P under the action of three forces - the tensions T1 and T2,and the horizontal force 50 N.The horizontal and vertical components of the resultant force must vanish separately :
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGceaqabeaacaWGub % WaaSbaaSqaaiaaigdaaeqaaOGaci4yaiaac+gacaGGZbGaeqiUdeNa % eyypa0JaamivamaaBaaaleaacaaIYaaabeaakiabg2da9iaaiAdaca % aIWaGaamOtaaqaaiaadsfadaWgaaWcbaGaaGymaaqabaGcciGGZbGa % aiyAaiaac6gacqaH4oqCcqGH9aqpcaaI1aGaaGimaiaad6eaaaaa!4C1E! \begin{array}{l} {T_1}\cos \theta = {T_2} = 60N\\ {T_1}\sin \theta = 50N \end{array}\)
which gives that
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaciiDaiaacg % gacaGGUbGaeqiUdeNaeyypa0ZaaSaaaeaacaaI1aaabaGaaGOnaaaa % caWGVbGaamOCaiabeI7aXjabg2da9iGacshacaGGHbGaaiOBamaaCa % aaleqabaGaeyOeI0IaaGymaaaakmaabmaabaWaaSaaaeaacaaI1aaa % baGaaGOnaaaaaiaawIcacaGLPaaacqGH9aqpcaaI0aGaaGimamaaCa % aaleqabaGaaGimaaaaaaa!4CE6! \tan \theta = \frac{5}{6}or\theta = {\tan ^{ - 1}}\left( {\frac{5}{6}} \right) = {40^0}\)
Note the answer does not depend on the length of the rope (assumed massless) nor on the point at which the horizontal force is applied.