-
Explanation of Common forces In Mechanics
Explanation of Common forces In Mechanics
In mechanics, we encounter several kinds of forces.The gravitational force is, of course, pervasive. Every object on the earth experiences the force of gravity due to the earth. Gravity also governs the motion of celestial bodies.The gravitational force can act at a distance without the need of any intervening medium.
All the other forces common in mechanics are contact forces*. As the name suggests, a contact force on an object arises due to contact with some other object: solid or fluid. When bodies are in contact (e.g. a book resting on a table,a system of rigid bodies connected by rods, hinges and other types of supports), there are mutual contact forces (for each pair of bodies) satisfying the third law.The component of contact force normal to the surfaces in contact is called normal reaction.The component parallel to the surfaces in contact is called friction.Contact forces arise also when solids are in contact with fluids.For example,for a solid immersed in a fluid, there is an upward bouyant force equal to the weight of the fluid displaced.The viscous force, air resistance,etc are also examples of contact forces (Fig. 5.9).
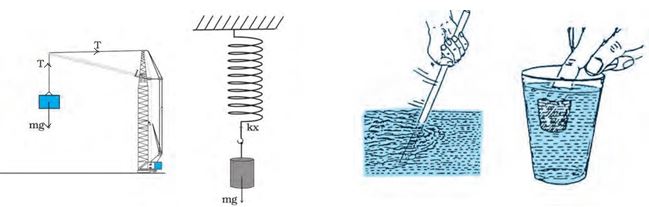
Two other common forces are tension in a string and the force due to spring.When a spring is compressed or extended by an external force, a restoring force is generated. This force is usually proportional to the compression or elongation (for small displacements).The spring force F is written as F = – k x where x is the displacement and k is the force constant. The negative sign denotes that the force is opposite to the displacement from the unstretched state. For an inextensible string, the force constant is very high.The restoring force in a string is called tension. It is customary to use a constant tension T throughout the string. This assumption is true for a string of negligible mass.
In Chapter 1, we learnt that there are four fundamental forces in nature. Of these, the weak and strong forces appear in domains that do not concern us here.Only the gravitational and electrical forces are relevant in the context of mechanics. The different contact forces of mechanics mentioned above fundamentally arise from electrical forces.This may seem surprising since we are talking of uncharged and non- magnetic bodies in mechanics.At the microscopic level, all bodies are made of charged constituents (nuclei and electrons) and the various contact forces arising due to elasticity of bodies, molecular collisions and impacts,etc.can ultimately be traced to the electrical forces between the charged constituents of different bodies.The detailed microscopic origin of these forces is, however,complex and not useful for handling problems in mechanics at the macroscopic scale.This is why they are treated as different types of forces with their characteristic properties determined empirically.
-
Friction
Friction
Let us return to the example of a body of mass m at rest on a horizontal table. The force of gravity (mg) is cancelled by the normal reaction force (N) of the table. Now suppose a force F is applied horizontally to the body. We know from experience that a small applied force may not be enough to move the body. But if the force F were the only external force on the body, it must move with acceleration F/m, howeversmall. Clearly, the body remains at rest because some other force comes into play in the horizontal direction and opposes the applied force F, resulting in zero net force on the body,it must move with acceleration F/m, however small. Clearly, the body remains at rest because some other force comes into play in the horizontal direction and opposes the applied force F, resulting in zero net force on the body.
This force fs parallel to the surface of the body in contact with the table is known as frictional force, or simply friction (Fig. 5.10(a)). The subscript stands for static friction to distinguish it from kinetic friction fk that we consider later (Fig. 5.10(b)). Note that static friction does not
exist by itself. When there is no applied force, there is no static friction. It comes into play the moment there is an applied force. As the applied
force F increases, f s also increases, remaining equal and opposite to the applied force (up to a certain limit), keeping the body at rest. Hence, it
is called static friction. Static friction opposes impending motion. The term impending motion means motion that would take place (but does not actually take place) under the applied force, if friction were absent.
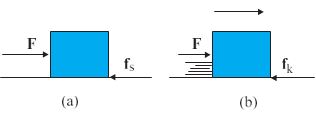
fig.5.10.Static and sliding friction: (a) Impending motion of the body is opposed by static friction.
When external force exceeds the maximum limit of static friction, the body begins to move.
(b) Once the body is in motion, it is subject to sliding or kinetic friction which opposes relative
motion between the two surfaces in contact. Kinetic friction is usually less than the maximum
value of static friction.
We know from experience that as the applied force exceeds a certain limit, the body begins to move. It is found experimentally that the limiting value of static friction (fs)max is independent of the area of contact and varies with the normal force(N) approximately as :
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaWaaeWaaeaaca % WGMbWaaSbaaSqaaiaadohaaeqaaaGccaGLOaGaayzkaaWaaSbaaSqa % aiGac2gacaGGHbGaaiiEaaqabaGccqGH9aqpcqaH8oqBdaWgaaWcba % Gaam4CaaqabaGccaWGobaaaa!415F! {\left( {{f_s}} \right)_{\max }} = {\mu _s}N\)
where \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiVd02aaS % baaSqaaiaadohaaeqaaaaa!38D0! {\mu _s}\) is a constant of proportionality depending only on the nature of the surfaces in contact.The constant \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiVd02aaS % baaSqaaiaadohaaeqaaaaa!38D0! {\mu _s}\)is called the coefficient of static friction. The law of static friction may thus be written as \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOzamaaBa % aaleaacaWGZbaabeaakiabgsMiJkabeY7aTnaaBaaaleaacaWGZbaa % beaakiaad6eaaaa!3D7B! {f_s} \le {\mu _s}N\)
If the applied force F exceeds (fs)max the body begins to slide on the surface. It is found experimentally that when relative motion has started, the frictional force decreases from the static maximum value (fs)max.Frictional force that opposes relative motion between surfaces in contact is called kinetic or sliding friction and is denoted by f k.Kinetic friction, like static friction, is found to be independent of the area of contact. Further, it is nearly independent of the velocity.It satisfies a law similar to that for static friction:
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamOzamaaBa % aaleaacaWGRbaabeaakiabg2da9iabeY7aTnaaBaaaleaacaWGRbaa % beaakiaad6eaaaa!3CBC! {f_k} = {\mu _k}N\)
where \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiVd02aaS % baaSqaaiaadUgaaeqaaaaa!38C8! {\mu _k}\) the coefficient of kinetic friction, depends only on the surfaces in contact.As mentioned above, experiments show that \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiVd02aaS % baaSqaaiaadUgaaeqaaaaa!38C8! {\mu _k}\) is less than \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaeqiVd02aaS % baaSqaaiaadUgaaeqaaaaa!38C8! {\mu _s}\). When relative motion has begun, the acceleration of the body according to the second law is ( F – fk )/m. For a body moving with constant velocity, F = fk.If the applied force on the body is removed, its acceleration is – fk /m and it eventually comes to a stop.
The laws of friction given above do not have the status of fundamental laws like those for gravitational, electric and magnetic forces. They are empirical relations that are only approximately true. Yet they are very useful in practical calculations in mechanics.
Thus, when two bodies are in contact, each experiences a contact force by the other. Friction, by definition, is the component of the contact force parallel to the surfaces in contact, which opposes impending or actual relative motion between the two surfaces. Note that it is not motion, but relative motion that the frictional force opposes.
Consider a box lying in the compartment of a train that is accelerating.If the box is stationary relative to the train,it is in fact accelerating along with the train. What forces cause the acceleration of the box? Clearly, the only conceivable force in the horizontal direction is the force of friction.
If there were no friction, the floor of the train would slip by and the box would remain at its initial position due to inertia (and hit the back side of the train).This impending relative motion is opposed by the static friction fs. Static friction provides the same acceleration to the box as that of the train, keeping it stationary relative to the train.
EXAMPLE 7
Determine the maximum acceleration of the train in which a box lying on its floor will remain stationary, given that the co-efficient of static friction between the box and the train’s floor is 0.15.
ANSWER
Since the acceleration of the box is due to the static friction,
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGceaqabeaacaWGTb % Gaamyyaiabg2da9iaadAgadaWgaaWcbaGaam4CaaqabaGccqGHKjYO % cqaH8oqBdaWgaaWcbaGaam4CaaqabaGccaWGobGaeyypa0JaeqiVd0 % 2aaSbaaSqaaiaadohaaeqaaOGaamyBaiaadEgaaeaacaWGPbGaaiOl % aiaadwgacaGGUaGaamyyaiabgsMiJkabeY7aTnaaBaaaleaacaWGZb % aabeaakiaadEgaaeaacqGH0icxcaWGHbGaeyizImQaeqiVd02aaSba % aSqaaiaadohaaeqaaOGaam4zaiabg2da9iaaicdacaGGUaGaaGymai % aaiwdacqGHxdaTcaaIXaGaaGimaiaad2gacaWGZbWaaWbaaSqabeaa % cqGHsislcaaIYaaaaaGcbaGaeyypa0JaaGymaiaac6cacaaI1aGaam % yBaiaadohadaahaaWcbeqaaiabgkHiTiaaikdaaaaaaaa!69AE! \begin{array}{l} ma = {f_s} \le {\mu _s}N = {\mu _s}mg\\ i.e.a \le {\mu _s}g\\ \therefore a \le {\mu _s}g = 0.15 \times 10m{s^{ - 2}}\\ = 1.5m{s^{ - 2}} \end{array}\)
EXAMPLE 8
See Fig. 5.11. A mass of 4 kg rests on a horizontal plane.The plane is gradually inclined until at an angle \(\theta\)= 15° with the horizontal, the mass just begins to slide. What is the coefficient of static friction between the block and the surface ?

fig.5.11.
ANSWER
The forces acting on a block of mass m at rest on an inclined plane are (i) the weight mg acting vertically downwards (ii) the normal force N of the plane on the block, and (iii) the static frictional force fs opposing the impending motion. In equilibrium, the resultant of these forces must be zero. Resolving the weight mg along the two directions shown, we have
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyBaiaadE % gaciGGZbGaaiyAaiaac6gacqaH4oqCcqGH9aqpcaWGMbWaaSbaaSqa % aiaadohacaGGSaaabeaakiaad2gacaWGNbGaci4yaiaac+gacaGGZb % GaeqiUdeNaeyypa0JaamOtaaaa!4871! mg\sin \theta = {f_{s,}}mg\cos \theta = N\)
As \(\theta\) increases, the self-adjusting frictional force fs increases until at \(\theta\)= \(\theta\)max, fs achieves its maximum value, \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaWaaeWaaeaaca % WGMbWaaSbaaSqaaiaadohaaeqaaaGccaGLOaGaayzkaaWaaSbaaSqa % aiGac2gacaGGHbGaaiiEaaqabaGccqGH9aqpcqaH8oqBdaWgaaWcba % Gaam4CaaqabaGccaWGobGaaiOlaaaa!4211! {\left( {{f_s}} \right)_{\max }} = {\mu _s}N.\)
Therefore
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaciiDaiaacg % gacaGGUbGaeqiUde3aaSbaaSqaaiGac2gacaGGHbGaaiiEaaqabaGc % cqGH9aqpcqaH8oqBdaWgaaWcbaGaam4CaaqabaGccaWGVbGaamOCai % abeI7aXnaaBaaaleaaciGGTbGaaiyyaiaacIhaaeqaaOGaeyypa0Ja % ciiDaiaacggacaGGUbWaaWbaaSqabeaacqGHsislcaaIXaaaaOGaeq % iVd02aaSbaaSqaaiaadohaaeqaaaaa!50AC! \tan {\theta _{\max }} = {\mu _s}or{\theta _{\max }} = {\tan ^{ - 1}}{\mu _s}\)
When \(\theta\) becomes just a little more than \(\theta\)max ,there is a small net force on the block and it begins to slide. Note that \(\theta\)max depends only on
\(\mu_s\) and is independent of the mass of the block.
For
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGceaqabeaacqaH4o % qCdaWgaaWcbaGaciyBaiaacggacaGG4baabeaakiabg2da9iaaigda % caaI1aWaaWbaaSqabeaacqWIyiYBaaaakeaacqaH8oqBdaWgaaWcba % Gaam4CaaqabaGccqGH9aqpciGG0bGaaiyyaiaac6gacaaIXaGaaGyn % amaaCaaaleqabaGaeSigI8gaaaGcbaGaeyypa0JaaGimaiaac6caca % aIYaGaaG4naaaaaa!4C44! \begin{array}{l} {\theta _{\max }} = {15^ \circ }\\ {\mu _s} = \tan {15^ \circ }\\ = 0.27 \end{array}\)
EXAMPLE 9
What is the acceleration of the block and trolley system shown in a Fig. 5.12(a), if the coefficient of kinetic friction between the trolley and the surface is 0.04? What is the tension in the string? (Take g = 10 m s-2). Neglect the mass of the string.
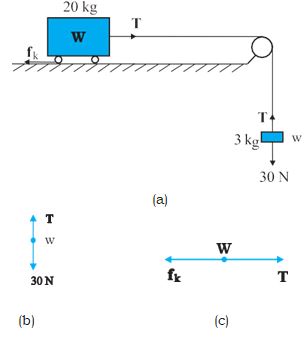
Fig.5.12
ANSWER
As the string is inextensible, and the pully is smooth,the 3 kg block and the 20 kg trolley both have same magnitude of acceleration. Applying second law to motion of the block (Fig. 5.12(b)),
30 – T = 3a
Apply the second law to motion of the trolley (Fig. 5.12(c)),
\(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGceaqabeaacaWGub % GaeyOeI0IaamOzamaaBaaaleaacaWGRbaabeaakiabg2da9iaaikda % caaIWaGaamyyaaqaaiaad6eacaWGVbGaam4DaiaadAgadaWgaaWcba % Gaam4AaaqabaGccqGH9aqpcqaH8oqBdaWgaaWcbaGaam4AaaqabaGc % caWGobGaaiilaaqaaiaadIeacaWGLbGaamOCaiaadwgacqaH8oqBda % WgaaWcbaGaam4AaaqabaGccqGH9aqpcaaIWaGaaiOlaiaaicdacaaI % 0aGaaiilaaqaaiaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVl % aaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaad6eacqGH9aqp % caaIYaGaaGimaiabgEna0kaaigdacaaIWaaabaGaaGPaVlaaykW7ca % aMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaa % ykW7caaMc8UaaGPaVlaaykW7caaMc8UaaGPaVlaaykW7caaMc8Uaey % ypa0JaaGOmaiaaicdacaaIWaGaamOtaiaac6caaaaa!8C60! \begin{array}{l} T - {f_k} = 20a\\ Now{f_k} = {\mu _k}N,\\ Here{\mu _k} = 0.04,\\ \,\,\,\,\,\,\,\,\,\,\,\,N = 20 \times 10\\ \,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\, = 200N. \end{array}\)
Thus the equation for the motion of the trolley is
T – 0.04 x 200 = 20 a Or T – 8 = 20a.
These equations give \(% MathType!MTEF!2!1!+- % feaagKart1ev2aaatCvAUfeBSjuyZL2yd9gzLbvyNv2CaerbuLwBLn % hiov2DGi1BTfMBaeXatLxBI9gBaerbd9wDYLwzYbItLDharqqtubsr % 4rNCHbGeaGqiVu0Je9sqqrpepC0xbbL8F4rqqrFfpeea0xe9Lq-Jc9 % vqaqpepm0xbba9pwe9Q8fs0-yqaqpepae9pg0FirpepeKkFr0xfr-x % fr-xb9adbaqaaeGaciGaaiaabeqaamaabaabaaGcbaGaamyyaiabg2 % da9maalaaabaGaaGOmaiaaikdaaeaacaaIYaGaaG4maaaacaWGTbGa % am4CamaaCaaaleqabaGaeyOeI0IaaGOmaaaakiabg2da9iaaicdaca % GGUaGaaGyoaiaaiAdacaWGTbGaam4CamaaCaaaleqabaGaeyOeI0Ia % aGOmaaaaaaa!4662! a = \frac{{22}}{{23}}m{s^{ - 2}} = 0.96m{s^{ - 2}}\) and T=27.1 N
-
Friction
Friction
A body like a ring or a sphere rolling without slipping over a horizontal plane will suffer no friction, in principle. At every instant, there is just one point of contact between the body and the plane and this point has no motion relative to the plane. In this ideal situation, kinetic or static friction is zero and the body should continue to roll with constant velocity. We know, in practice, this will not happen and some resistance to motion (rolling friction) does occur,i.e. to keep the body rolling, some applied force is needed. For the same weight, rolling friction is much smaller (even by 2 or 3 orders of magnitude) than static or sliding friction.This is the reason why discovery of the wheel has been a major milestone in human history.
Rolling friction again has a complex origin, though somewhat different from that of static and sliding friction. During rolling, the surfaces in contact get momentarily deformed a little, and this results in a finite area (not a point) of the body being in contact with the surface. The net effect is that the component of the contact force parallel to the surface opposes motion.
We often regard friction as something undesirable. In many situations, like in a machine with different moving parts, friction does have a negative role. It opposes relative motion and thereby dissipates power in the form of heat, etc. Lubricants are a way of reducing kinetic friction in a machine. Another way is to use ball bearings between two moving parts of a machine [Fig. 5.13(a)]. Since the rolling friction between ball bearings and the surfaces in contact is very small, power dissipation is reduced. A thin cushion of air maintained between solid surfaces in relative motion is another effective way of reducing friction (Fig. 5.13(a)).
In many practical situations, however, friction is critically needed. Kinetic friction that dissipates power is nevertheless important for quickly stopping relative motion. It is made use of by brakes in machines and automobiles. Similarly, static friction is important in daily life. We are able to walk because of friction. It is impossible for a car to move on a very slippery road. On an ordinary road, the friction between the tyres and the road provides the necessary external force to accelerate the car.

fig.5.13.Some ways of reducing friction. (a) Ball bearings placed between moving parts of a machine.
(b) Compressed cushion of air between surfaces in relative motion.