-
Vectors-Types Of Vectors
VECTORS
Physical quantities:
All measurable quantities are called physical quantities.
Physical quantities are classified into scalars and vectors.
Scalar Quantities: Physical quantities having only magnitude are called scalars.
Examples: Length, area, volume, distance, speed, mass, time, temperature, density, work, energy, power etc. are scalars.
Vector Quantities: Physical quantities having both magnitude and direction and which obey the laws of vector addition are called vectors.
Vectors are represented with letters with an arrow above it (\( \vec a \)) or with a letter a bar above it (\( \vec a \)) or just with a bold letter (a)
Examples : Displacement, velocity, acceleration, momentum, force, impulse, torque etc. are vectors To describe a vector quantity we require
a) The specific unit of that quantity.
b) The number of times that unit is contained in that quantity (magnitude).
c) the orientation of that quantity.
Example: A bird is flying from east to west with a velocity of 100ms-1.
Note: A physical quantity having magnitude and direction but not obeying laws of vector addition is treated as a scalar.
For example, A current in a wire is represented by the direction but it is not vector quantity because it does not obey the laws of vector addition.
Geometrical Representation of vector and its magnitude: A vector is represented by a directed line segment. Length of that line segment is proportional to the magnitude of the physical quantity which it represents and the arrow of that denotes the direction of vector.
For example if a displacement of 1 meter is represented by a vector of length 1 unit, then a displacement of 2 meter is represented by a vector of length 2 units.
\( \left| {\vec A} \right| \)denotes magnitude of \( \vec A \).
Note:
1) A vector remains unchanged when it is moved parallel to itself. Using this principle, any vector can be shifted in the same plane.
2) We have certain pairs of physical quantities having same units or dimensions but one of those is a scalar and the other is vector.
Example : Distance and displacement, Speed and velocity, work and torque
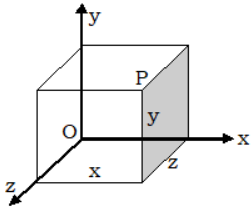
Cartesian co–ordinate system: In order to describe the motion of an object we must specify its position relative to observer. One of the most convenient co – ordinate system is Cartesian co–ordinate system. It consists of three mutually perpendicular axes designated as x – axis, y–axis and z–axis. Location of any point p is specified by three co–ordinates x, y, and z as shown in the figure.
-
Vectors-Types Of Vectors
Types of vectors
1) Equal vectors: If two vectors have same magnitude and direction they are said to be equal vectors.
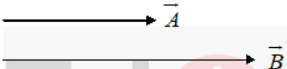
2) Like vectors or Parallel vectors: If two vectors have the same direction but different magnitudes, they are said to be like vectors or parallel vectors.
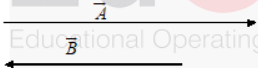
3) Unlike vectors or antiparallel vectors: If two vectors have opposite directions and different magnitudes, they are said to be unlike vectors or antiparallel vectors.
4) Negative vector: If two vectors and have equal magnitude but opposite directions, then each vector is negative vector of the other.
i.e., \( \overrightarrow A = - \overrightarrow B \) or \( \overrightarrow B = - \overrightarrow A \)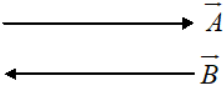
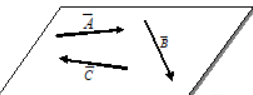
5) Co–planar vectors: Vectors, acting in the same plane are called co–planar vectors.
6) Non Co–planar vectors: Vectors, acting in different plane are called non-coplanar vectors.
7) Orthogonal vectors: If the angle between two vectors is 90°, those vectors are called orthogonal vectors.
8) Unit vector: A vector having unit magnitude is called unit vector. If \( \overrightarrow A \) is given vector
then unit vector in its direction is given by \( \mathop A\limits^ \wedge = \frac{{\overrightarrow A }} {{\left| {\overrightarrow A } \right|}} \)
\( \Rightarrow \overrightarrow A = \left| {\overrightarrow A } \right|\mathop A\limits^ \wedge \) . Here is the unit vector parallel to \( \vec A \)
Note:A) A vector parallel to \(\vec A\) and having magnitude same as that of \(\vec B\)is given by \( \left| {\overrightarrow B } \right|\mathop A\limits^ \wedge \) .
B) The unit vectors along x–axis, y–axis and z–axis are denoted by \(\hat i\) ,\(\hat j\)and \(\hat k\). These are the orthogonal unit vectors or Orthonormal base or vector triad.
\( \hat i = \frac{{\vec x}} {x} \Rightarrow \vec x = x\hat i \) ;
\( \hat j = \frac{{\vec y}} {y} \Rightarrow \vec y = y\hat j \) ;
\( \hat k = \frac{{\vec z}} {z} \Rightarrow \vec z = z\hat k \)
For example a vector of magnitude 6 along –x axis (–ve x –axis) is \( \vec x = 6\left( { - \hat i} \right) = - 6\hat i \)
9) Zero vector: A vector of zero magnitude is called zero vector or null vector. It is \(\vec O\) denoted as . The initial point and terminal point of a null vector coincide. So, direction of null vector is indeterminate.
Examples: Velocity of a body projected vertically up at the highest point, velocity of bob of a simple pendulum at the extreme position.
Properties of zero vector :
A) \( \vec a + \vec o = \vec a \)
B) \( \vec a + \vec b + \vec o = \vec a + \vec b \)
C) \( \vec a - \vec a = \vec o \)
D) \( n\vec o = \vec o \)
10) Position vector: The vector which specifies the position of a point with respect to some fixed point (like origin) is called position vector.
If P (x, y, z) be the position of a point with respect to the origin O.
\( \overrightarrow {OP} = \overrightarrow r = x\mathop i\limits^ \wedge + y\mathop j\limits^ \wedge + z\mathop k\limits^ \wedge \)
Magnitude of \(\vec r\) is \( \left| {\overrightarrow r } \right| = \sqrt {x^2 + y^2 + z^2 } \)
The unit vector along \(\vec r\) is given by
A) Co-initial vectors: The vectors having same initial point are called co-initial vectors.
B) Co-terminal vectors: The vectors having same final or terminal point are called co-initial vectors.